Generally speaking, the development process of an embedded system is as follows:
Identify the needs of embedded systems;
Design system architecture: Select processor and related external devices, operating system, development platform, and hardware and software partitioning and overall system integration;
Detailed hardware and software design and RTL code, software code development;
Joint debugging and integration of hardware and software;
System testing.
I. Step 1: Determine the requirements of the system:
The typical characteristics of embedded systems are user-oriented, product-oriented, and application-oriented. Market applications are the guiding and premise of embedded system development. The design of an embedded system depends on the needs of the system.
1, MVB bus introduction
Train CommunicaTIon Network (TCN) is an IEC international standard (IEC-61375-1) for train data communication that integrates internal measurement and control tasks and information processing tasks. It includes two types of bus types. Train bus (WTB) and multi-function car bus (MVB).
TCN's position in the train control system is quite similar to the status of the CAN bus in automotive electronics. The Multi-Function Vehicle Bus MVB is a standard communication medium for transferring and exchanging data between devices on a train. Devices attached to the bus may differ in function, size, and performance, but they are all connected to the MVB bus and exchange information over the MVB bus to form a complete communication network. In the MVB system, according to the IEC-61375-1 train communication network standard, the MVB bus has the following features:
Topology: The structure of the MVB bus follows the OSI model and draws on the ISO standard. Supports up to 4095 devices controlled by a central bus manager. Simple sensors and smart stations coexist on the same bus.
Data Type: The MVB bus supports three data types:
a. Process data: Process variables represent the state of the train, such as speed, motor current, and operator commands. The value of a process variable is called process data. Their transmission time is deterministic and bounded. To ensure this delay time, these data are transmitted periodically.
b. Message data: The message is divided into small packets, which are numbered and confirmed by the destination station. The message packet and its associated control data form the message data. Message data is transmitted as commands. The function message is used by the application layer; the service message is used for management of the train communication system itself.
c. Monitoring data: It is a short frame. The master device uses it for status check of devices in the same bus, detection of online devices, sovereign transmission, initial train operation and other management functions.
Media access form: MVB bus supports RS485 copper media and fiber. The data format of its physical layer is 1.5 Mbps serial Manchester encoded data.
Media access to the MVB is managed by the bus manager BA, which is the only bus master and all other devices are slaves. The master device periodically polls the ports in a predetermined order, during which the master device processes the sporadic requests.
Reliability measures: MVB fault tolerance measures include
Integrity of the transmission: The link layer has an extended error detection mechanism. The mechanism provides a Hamming code distance of 8, which can detect bit, frame and synchronization errors.
Failure independence: Copper media is usually fully configured in duplicate to ensure equipment failure independence.
Availability of delivery: Availability can be improved by means of media redundancy, power redundancy, and manager redundancy.
2. The basic requirements of the MVB system are as follows:
a. Fully compatible with IEC-61375-1 (TCN) international standards, supporting three data types of process data, message data, and monitoring data defined by the MVB bus.
b. The system is configurable to:
i. Bus Manager (BA) function
Ii. Bus Manager (BA) functions and communication functions
Iii. Independent communication function
c. Processor with ARM7TDMI
d. Using a real-time operating system
e. Real-Time Protocol Stack Protocol (RTP) for TCN
f. Support process data for 4096 logical ports
g. Support dual-port RAM interface with host PC104 host
h. Input voltage 5V
i. Working environment temperature: -40 ° C ~ 75 ° C
3. Other needs
The multi-function vehicle bus MVB system is designed in synchronization with the user's train control system and has strict time limits.
Second, step 2: design the system architecture, collaboratively allocate hardware / software requirements
The embedded system consists of two parts: hardware and software: the hardware architecture is centered on the embedded processor, and the necessary peripherals such as memory, I/O equipment, and communication module are configured. The software part is based on the software development platform and provides application programming upward. Interface (API), which blocks the board-level support package BSP for specific hardware features. In the embedded system, the software and hardware work closely together to coordinate the work and jointly complete the functions scheduled by the system. According to the seven-layer model of OSI, it can be determined that the link layer and the physical layer are implemented by hardware, and the other layers are implemented by software, as shown in FIG.
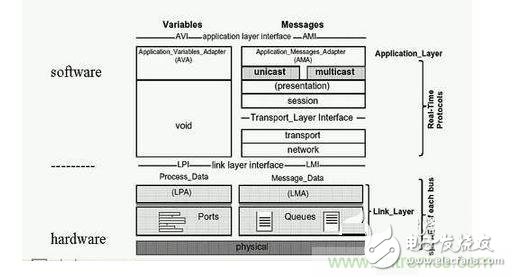
Figure 1: OSI model of MVB and hardware and software partitioning of MVB system.
1, embedded operating system selection:
In general, there are several factors to consider when choosing an operating system for an embedded system:
Operating system supported microprocessor
Operating system performance
Software components and device drivers for the operating system
Operating system debugging tools, development environment, in-circuit emulator (ICE), compiler, assembler, connector, debugger, emulator, etc.
Standard compatibility of the operating system
Technical support level of the operating system
Is the operating system providing source code or object code?
License usage of the operating system
Operating system developer reputation status
Solar Power Battery,Nife Batteries For Solar,Nickel Iron Battery 400Ah,Ni-Fe Battery 250~400Ah
Henan Xintaihang Power Source Co.,Ltd , https://www.taihangbattery.com