1 Introduction
Google Earth software from Google in recent years is a very good satellite map service software. It provides free satellite maps with high accuracy. The areas in most areas are relatively clear, especially the photos of various cities, which can clearly see the vehicles on the road. In China ’s satellite images, first-tier cities are mainly shot in 2009 and 2010, and second- and third-tier cities are mainly stock pictures in 2005 and 2006, which can better meet the requirements of navigation.
In the paid version above Google Earth Plus, a GPS interface is also provided, which can display the map and movement track of the current location in real time. This feature is not included in the free version. Therefore, designing a GPS navigation system based on Google Earth is also very practical. Through this system, complete the control of Google Earth software, so as to achieve the purpose of GPS-based physical map navigation.
2 Demand analysis
2.1 Functional requirements
The system consists of the following four parts:
1) Communication module between GPS navigation system and GPS equipment.
2) The WEB server accepts the Network Link request from Google Earth and responds to the current coordinates and track information.
3) The navigation of the predetermined track, the position is detected according to the predetermined track, and the alarm function when deviating from the predetermined track is realized.
4) Provide tools for trajectory management and data exchange with other GPS.
2.2 Data flow analysis
As shown in Figure 1, in the entire system, the flow of data is more important, and the interaction of data information between various functions is the flow of data. The GPS hardware device is a data source, which constantly receives signals from the satellites, organizes them into a formatted data stream and transmits them to the system through calculation, and the system reads these GPS information and interacts with other functions inside the system. Cooperate to complete a series of functions. Since the system needs to control Google Earth to complete the navigation function of the satellite map, there must be a way to control the Google Earth software to complete this task. This function needs to control Google Earth in some way by reading the information previously read from the GPS hardware device. In addition, the system's trajectory management function also needs to cooperate with other functions to complete a series of management functions.
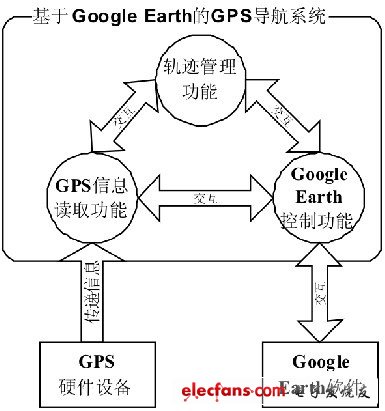
Figure 1 Data flow diagram
3 System design
3.1 System model

Figure 2 System model diagram
The model of the complete system for GPS navigation is shown in Figure 2. This includes many external hardware devices and software systems, and our GPS navigation system is installed in the user's PC or laptop.
First of all, the GPS device continuously receives wireless signals from various satellites, and calculates the current coordinates and other relevant geographic information through its own firmware. Then carry on the bluetooth communication with the computer to transmit these geographic information, and in the computer, the bottom layer of the operating system simulates the bluetooth communication as the basic serial communication, for the application to call. The GPS navigation system automatically recognizes the port number in the current computer that is simulated as a serial port, and continuously reads the geographic information from the GPS device. Then control the display of Google Earth through the Google Earth control module. If the current map information has not been loaded, Google Earth will connect to the Google Earth server according to the current network situation to obtain map information corresponding to the coordinate perspective. Users generally need this kind of navigation when driving, so if possible, they can connect to the Google Earth server through a laptop wireless network, as shown in Figure 2.
3.2 Division of functional modules
The entire system is composed of four modules. They are GPS device communication module, WEB server module, scheduled track navigation module, and user graphical interface.
1) The communication module of the GPS device reads the geographic information sent by the GPS device according to the analog serial port of Bluetooth at the bottom of the operating system, and filters useless information, and dynamically updates it to a custom data structure.
2) The WEB server module accepts the Network Link request from Google Earth, combines the coordinate information previously updated in the structure, generates a KML file for changing the display of Google Earth, and responds to Google Earth.
3) The predetermined trajectory navigation module first loads the KML file to obtain the predetermined trajectory information. After the navigation function is activated, the current position is detected according to the predetermined trajectory in real time, and an alarm function is provided when the current position deviates from the predetermined trajectory.
4) User graphical interface In order to facilitate the user's quick use, this system provides a toolbar button group similar to Kingsoft Express, all functions are all completed by several image buttons on the toolbar. Very convenient.
3.3 Analysis of core modules
3.3.1 GPS module
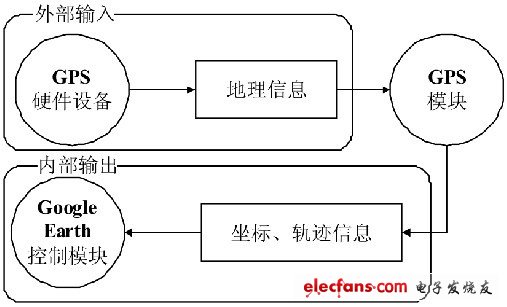
Figure 3 GPS module analysis
Here, the input of the GPS module is the geographic information sent from the GPS hardware device, and its output is the coordinates and trajectory information extracted from these geographic information, and passed to the GoogleEarth control module. Internally complete the serial port data reception and coordinate trajectory extraction.
3.3.2 Google Earth Control Module
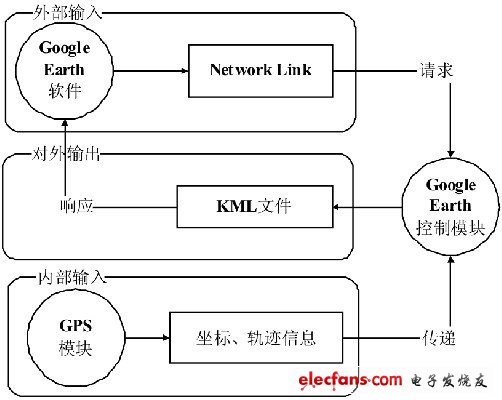
Figure 4 Google Earth control module analysis
The Google Earth control module has two inputs, one is an external input, which is a request from Google Earth, and one is used to construct the coordinates and trajectory information used in response to this request. The information comes from the GPS module and is externally output. It is a KML file that responds to Google Earth.
Remote Vibration Collar,Rechargeable Dog Training Collar,Remote Dog Training Collars,Long Range Dog Training Collar
Elite-tek Electronics Ltd , https://www.aetertek.ca