The popularity of ADAS has become higher and higher. With the limelight of autopilot, manufacturers and suppliers have opened their minds and imagined different forms of ADAS. The mainland's electronic horizon technology is one of them. According to the change of the front terrain, the operating conditions of the engine are changed in advance to reduce the fuel consumption and comfort of the vehicle. BMW's ASR technology is also considered one. This technique will give a suitable speed recommendation based on the change in terrain and the speed limit information of the road, and display it in the dashboard to remind the driver to change the speed.
What is ADASIS?
The ADAS in front of ADASIS refers to advanced driver assistance, and the last IS is Interface SpecificaTIons, which is the interface description of ADAS. To explain ADASIS, you must first look back to around 2000. At that time, in Europe, the navigation function began to spread in the vehicle, and the role of the map gradually began to shift from the ordinary planning navigation path to the enhancement of the vehicle component function, which is straightforward, that is, used to enhance the vehicle. Advanced driving assistance technology. The implementation of ADAS is inseparable from the various sensors on the vehicle, but no matter what sensor is monitored, it monitors the surrounding area of ​​the vehicle. If you can get the vehicle to get data farther away, the function of ADAS can be enhanced.
If you are in the current technology environment, there are many ways to achieve this goal. For example, cloud technology allows other vehicles to collect data and upload it to the cloud, and then send it to other vehicles that will pass through it; or use V2X technology. This can also be achieved. But in the circumstances at the time, it was the map that was slid out to achieve this function. In order to clarify the relevant implementation standards of ADAS Horizon and develop a unified map data interface, in May 2001, the ADASIS Forum was established. The initial members were car manufacturers, in-vehicle system developers and graphic dealers from the European automotive industry. After a year of research and basic work was completed, the ADASIS Forum was assigned to ERTICO (ITS Europe, the European Intelligent Transportation Organization).
What is the role of the ADASIS Forum?
The purpose of the ADASIS Forum is to develop an implementation standard for ADAS Horizon and a unified map data interface. So, what is their specific job? To understand this, you can take a look at their ADASIS system architecture to illustrate.
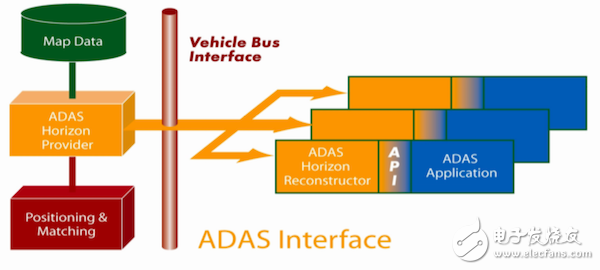
ADASIS system architecture
As can be seen from the above figure, the map data cannot be directly passed to the ADAS system, but a process of decomposition and reorganization is required. First, there must be a data extraction unit. The data extraction unit extracts detailed terrain and road related data, as well as vehicle location information. After the extraction unit extracts the data, it generates the data required by ADAS Horizon and then transmits it via the relevant CAN bus of the vehicle. Then, there is a reconstruction unit that receives the data. After receiving the transmitted data, the reconstruction unit turns it into data that can be understood by different ADAS systems, and then delivers different data to different ADAS systems according to requirements. In this process, what the extractor needs to extract and transmit, how to transfer it, how to refactor and distribute it is what the ADASIS Forum should do. Of course, the process itself is also the work of the ADASIS Forum. To sum up, the ADASIS Forum has two jobs:
1. Develop a system architecture of open source standards to extract and reconstruct the data required by the ADAS system;
2. Develop an interface protocol for unified map data (including vehicle location data) so that data can be successfully extracted and transferred to the ADAS system.
After the ADASIS Forum was incorporated into ERTICO, in early 2004, members of the ADASIS Forum started a project called PReVENT MAPS & ADAS. This project is to clarify the details of the relevant standards and develop corresponding test methods. The ADASIS Forum validated the concept of ADASIS and the above system architecture through this project, and after the project was completed, released the first standard protocol ADASIS v1.
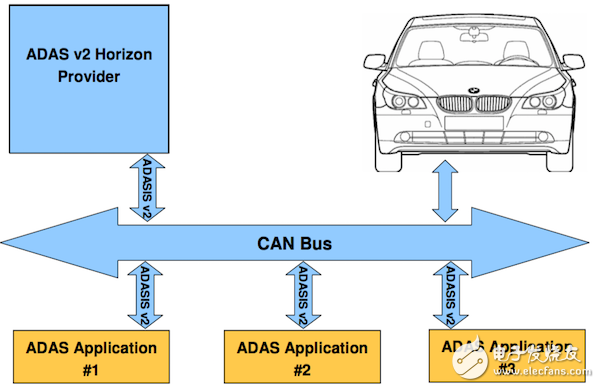
ADASIS v2
ADASIS v1 was introduced on the basis of verifying the feasibility of its concept. However, it has not been used on any OEM production model. On the contrary, more and more companies have launched their own solutions (without using uniform standards), which has seriously affected the implementation of ADASIS standards. So the ADASIS Forum began to discuss why other companies are reluctant to use v1. In the end, in addition to excluding internal factors, the main reason for analyzing the reluctance of these companies to use v1 is that the standards are too complicated. Complex communication protocols and the amount of data that is required to be transmitted will allow developers to spend a lot of time and cost on the data extraction unit and the reconstruction unit, especially on production models. As a result, the ADASIS Forum embarked on a second edition of the standard specification, focusing on reducing the CAN bus resources occupied by the system and extracting and reconstructing data using minimal principles.
In v1, the system extracts all path planning schemes according to the current location of the vehicle and the final destination, and the most preferred path is called the most probable path, and the other scheme is the backup scheme. All the solutions are extracted and reconstructed, and finally the recommendations for which path to choose and how to drive through are passed to different ADAS systems. The reason why the amount of data in v1 is too large is that too much data is extracted. This is also the point of change in v2. V2 can be seen as a simplified version of the protocol. In v2, the transmission follows the single path concept. What is a single path? That is, only one of the paths is selected when the data is passed, and the possible alternatives are represented by the intersection (STUB) in the path. The path between each intersection is called a road section. The road section is regarded as the basic unit that constitutes the path. The data is analyzed and utilized in units of each road segment.
Best Solar Flood Lights,Solar Motion Flood Lights,Solar Sensor Security Light,Commercial Solar Flood Lights
Jiangmen Liangtu Photoelectric Technology Co., Ltd. , https://www.liangtulight.com